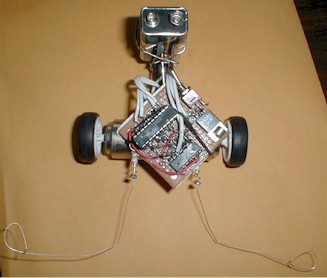
 Switchy was my first attempt at a robot that was basically
a modified H bridge and two switches. Beam-online has an excellent
tutorial on how to make the front bump switches I used on the front of Switchy.
The basic design is a Microcore that has two outputs low and two high and when
the microcore sees a high signal from one bump switch it reverses the outputs
thereby reversing the motors. So when Switchy is in normal state he moves
forward, when a bump sensor hits something he rotates away from that sensor and
when both sensors hit something he just backs up. This design was very
simple and hardly qualifies as a robot, but its neat to watch him scoot along
and avoid obstacles.
Switchy was my first attempt at a robot that was basically
a modified H bridge and two switches. Beam-online has an excellent
tutorial on how to make the front bump switches I used on the front of Switchy.
The basic design is a Microcore that has two outputs low and two high and when
the microcore sees a high signal from one bump switch it reverses the outputs
thereby reversing the motors. So when Switchy is in normal state he moves
forward, when a bump sensor hits something he rotates away from that sensor and
when both sensors hit something he just backs up. This design was very
simple and hardly qualifies as a robot, but its neat to watch him scoot along
and avoid obstacles.
 I think the simplicity of design is what makes him work so
well. One of the aspects of Beam design is the idea that basic tasks
(walking, turning to face light, object avoidance) should be 'built in' or
instinct for our robots and then additional circuitry can influence or change
these basic behaviors. Using this method there is no need for powerful
processors to calculate every possible scenario. Much like some of the
systems of the body (breathing, site, blinking) that are autonomous , we don't
consciously have to control them - this same principle can apply to our
bots. Build in systems and make each system as autonomous as possible and
yet still allow outside influence from our programming. Bicore and Microcore are
perfect for this type of design platform.
I think the simplicity of design is what makes him work so
well. One of the aspects of Beam design is the idea that basic tasks
(walking, turning to face light, object avoidance) should be 'built in' or
instinct for our robots and then additional circuitry can influence or change
these basic behaviors. Using this method there is no need for powerful
processors to calculate every possible scenario. Much like some of the
systems of the body (breathing, site, blinking) that are autonomous , we don't
consciously have to control them - this same principle can apply to our
bots. Build in systems and make each system as autonomous as possible and
yet still allow outside influence from our programming. Bicore and Microcore are
perfect for this type of design platform.
 Mark Tilden proved that just using a Bicore and Microcore
you could construct a robot walker that could follow a light source and no
embedded code or programming was used. It was all instinct for this bot.
Mark Tilden proved that just using a Bicore and Microcore
you could construct a robot walker that could follow a light source and no
embedded code or programming was used. It was all instinct for this bot.