 Tweaker 1.0
Tweaker 1.0
Tweaker 1.0
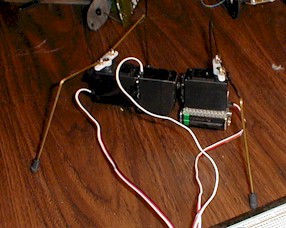
Tweaker is a new robot that is just in development stages right now so some items will be changed on the final product. Send some input on what you would like to see and most likely I'll include it on the finished bot. Tweaker uses three standard hobby servos to control his gait. Two servos control the legs forward and back, the third servo controls his 'bending' at the waist which allows him to pick up his front legs and lift them over obstacles. Sensors will probably include two cadium sulfide cells to measure light to the left and right, and a 40khz obstacle detection system that will scan upto 30 degrees in front of the bot. Data will then be transmitted back to the PC using the new RF units from Reynolds electronics, and serial protocol (RS232) will be used just like in RuF bot and a VB program will read the incoming data and display object location and brightest point of light. Tweakers' programming will make him seek the brightest point of light to recharge his batteries and avoid obstacles on the way there.
 Here is the schematic for tweaker's receiver that connects to a PC via
the serial port connector (DB 9). The Visual basic program that I wrote for tweaker
takes the incoming data from the receiver and separates it for display on the screen.
Incoming data includes: obstacle detection, light intensity and direction, and
a counter to keep track of distance and steps traveled. You will notice that
all the power from this circuit is drawn through the PC serial port. The RTS and DTR
lines are where the power is pulled from. These lines are normally in a negative
voltage so the Visual Basic DTRenable and RTSenable commands must be used to drive the
lines high, The software does this seamlessly so all that is needed is to download the
program and build the receiver. The average serial port can supply from 8 to10
milliamps of power. The 7508 5v regulator requires 3-4ma and the RXLC-434 requires
between 4-7ma with a typical load of 5ma. That runs us right at 9ma most of the time
so it's cutting it close and I don't recommend this for the faint of heart. The real
danger to the port is actually quite small since the RS232 serial port protocol calls for
an ability to 'handle direct short circuits of any duration'. One thing to keep in
mind is that in an effort to save battery power some laptop's will not be able to supply
the needed voltage or current to operate the device, in this case an additional power
source is required (for instance a 9v battery). The 200 ohm resistor is a current
limiting resistor used for 5v operation to keep the RX unit from drawing too much power,
when possible use a 3.3volt regulator to bypass this resistor and further reduce power
consumption. Overall this makes for a simple and solid circuit that works on nearly
any PC serial port that can run VB. The third, and unused pin, on the RXLC-434 is
the PDN line, It is used to send the receiver into a sleep mode that requires as little as
700ua (that's microamps) while the line is pulled to a ground state. I don't use
this line although you could if you planned on leaving the module plugged in for extended
times, by simply adding some additional code to the VB program and monitoring for idle
time.
Here is the schematic for tweaker's receiver that connects to a PC via
the serial port connector (DB 9). The Visual basic program that I wrote for tweaker
takes the incoming data from the receiver and separates it for display on the screen.
Incoming data includes: obstacle detection, light intensity and direction, and
a counter to keep track of distance and steps traveled. You will notice that
all the power from this circuit is drawn through the PC serial port. The RTS and DTR
lines are where the power is pulled from. These lines are normally in a negative
voltage so the Visual Basic DTRenable and RTSenable commands must be used to drive the
lines high, The software does this seamlessly so all that is needed is to download the
program and build the receiver. The average serial port can supply from 8 to10
milliamps of power. The 7508 5v regulator requires 3-4ma and the RXLC-434 requires
between 4-7ma with a typical load of 5ma. That runs us right at 9ma most of the time
so it's cutting it close and I don't recommend this for the faint of heart. The real
danger to the port is actually quite small since the RS232 serial port protocol calls for
an ability to 'handle direct short circuits of any duration'. One thing to keep in
mind is that in an effort to save battery power some laptop's will not be able to supply
the needed voltage or current to operate the device, in this case an additional power
source is required (for instance a 9v battery). The 200 ohm resistor is a current
limiting resistor used for 5v operation to keep the RX unit from drawing too much power,
when possible use a 3.3volt regulator to bypass this resistor and further reduce power
consumption. Overall this makes for a simple and solid circuit that works on nearly
any PC serial port that can run VB. The third, and unused pin, on the RXLC-434 is
the PDN line, It is used to send the receiver into a sleep mode that requires as little as
700ua (that's microamps) while the line is pulled to a ground state. I don't use
this line although you could if you planned on leaving the module plugged in for extended
times, by simply adding some additional code to the VB program and monitoring for idle
time.
 Some new
updates since the last day or two's progress. I have found that the RXLC-434 can be
powered directly off most all serial ports without the 5v regulator but keeping the 200
ohm resistors in line with the DTR/RTS lines. Of course these two lines must still
be set high by software. If I get enough requests for the test program I will
provide a download.
Some new
updates since the last day or two's progress. I have found that the RXLC-434 can be
powered directly off most all serial ports without the 5v regulator but keeping the 200
ohm resistors in line with the DTR/RTS lines. Of course these two lines must still
be set high by software. If I get enough requests for the test program I will
provide a download.